1.Tujuan [Kembali]
2. Alat dan Bahan [Kembali]
3. Dasar teori [Kembali]


bagian-nagian LDR:

grafik respon LDR:

2. arduino:

Kaki-kaki yang terdapat pada LCD
a. Untuk
memenuhi persyaratan dari Modul 4
b. Praktikan dapat mengkombinasikan sensor dan Praktikan dapat membuat sebuah sistem menggunakan mikrokontroler
c. Merancang portal otomatis mengunakan sensor LDR (Light Dependent Resistor) dan menampilkan input pada LCD.
b. Praktikan dapat mengkombinasikan sensor dan Praktikan dapat membuat sebuah sistem menggunakan mikrokontroler
c. Merancang portal otomatis mengunakan sensor LDR (Light Dependent Resistor) dan menampilkan input pada LCD.
2. Alat dan Bahan [Kembali]
1. LDR
(Light Dependent Resistor)
2. arduino:
3. LCD 16 X
2:
4. Motor
servo:
5. LED
3. Dasar teori [Kembali]
1.
Light Dependent Resistor (LDR)
Light Dependent Resistor atau disingkat dengan LDR adalah jenis Resistor yang nilai hambatan atau nilai resistansinya tergantung pada intensitas cahaya yang diterimanya. Nilai Hambatan LDR akan menurun pada saat cahaya terang dan nilai Hambatannya akan menjadi tinggi jika dalam kondisi gelap. Dengan kata lain, fungsi LDR (Light Dependent Resistor) adalah untuk menghantarkan arus listrik jika menerima sejumlah intensitas cahaya (Kondisi Terang) dan menghambat arus listrik dalam kondisi gelap.
Prinsip kerja LDR sangat sederhana tak jauh berbeda dengan variable resistor pada umumnya. LDR dipasang pada berbagai macam rangkaian elektronika dan dapat memutus dan menyambungkan aliran listrik berdasarkan cahaya. Semakin banyak cahaya yang mengenai LDR maka nilai resistansinya akan menurun, dan sebaliknya semakin sedikit cahaya yang mengenai LDR maka nilai hambatannya akan semakin membesar. Naik turunnya nilai Hambatan akan sebanding dengan jumlah cahaya yang diterimanya. Pada umumnya, Nilai Hambatan LDR akan mencapai 200 Kilo Ohm (kΩ) pada kondisi gelap dan menurun menjadi 500 Ohm (Ω) pada Kondisi Cahaya Terang.
Light Dependent Resistor atau disingkat dengan LDR adalah jenis Resistor yang nilai hambatan atau nilai resistansinya tergantung pada intensitas cahaya yang diterimanya. Nilai Hambatan LDR akan menurun pada saat cahaya terang dan nilai Hambatannya akan menjadi tinggi jika dalam kondisi gelap. Dengan kata lain, fungsi LDR (Light Dependent Resistor) adalah untuk menghantarkan arus listrik jika menerima sejumlah intensitas cahaya (Kondisi Terang) dan menghambat arus listrik dalam kondisi gelap.
Prinsip kerja LDR sangat sederhana tak jauh berbeda dengan variable resistor pada umumnya. LDR dipasang pada berbagai macam rangkaian elektronika dan dapat memutus dan menyambungkan aliran listrik berdasarkan cahaya. Semakin banyak cahaya yang mengenai LDR maka nilai resistansinya akan menurun, dan sebaliknya semakin sedikit cahaya yang mengenai LDR maka nilai hambatannya akan semakin membesar. Naik turunnya nilai Hambatan akan sebanding dengan jumlah cahaya yang diterimanya. Pada umumnya, Nilai Hambatan LDR akan mencapai 200 Kilo Ohm (kΩ) pada kondisi gelap dan menurun menjadi 500 Ohm (Ω) pada Kondisi Cahaya Terang.
LDR (Light
Dependent Resistor) yang merupakan Komponen Elektronika peka cahaya ini sering
digunakan atau diaplikasikan dalam Rangkaian Elektronika sebagai sensor pada
Lampu Penerang Jalan, Lampu Kamar Tidur, Rangkaian Anti Maling, Shutter Kamera,
Alarm dan lain sebagainya.
bagian-nagian LDR:
grafik respon LDR:
2. arduino:
Arduino adalah
kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat
komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan
Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang
menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan
komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun
perangkat lain.
Adapun
spesifikasi dari Arduino Uno ini adalah sebagai berikut :

Microcontroller
ATmega328P
|
Operating
Voltage
5
V
|
Input
Voltage
(recommended)
7 – 12 V
|
Input
Voltage
(limit)
6 – 20 V
|
Digital
I/O
Pins
14 (of which 6 provide PWM output)
|
PWM
Digital I/O
Pins
6
|
Analog
Input
Pins
6
|
DC Current
per I/O
Pin
20 mA
|
DC Current
for 3.3V
Pin
50 mA
|
Flash
Memory
32
KB of which 0.5 KB used by bootloader
|
SRAM
2 KB
|
EEPROM
1 KB
|
Clock
Speed
16 MHz
|
POWER USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
POWER JACK
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
Crystal
Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino.
Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino.
Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
Digunakan untuk mengulang program Arduino dari awal atau Reset.
Digital Pins
I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
LED Power
Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
3. LCD:
Liquid Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi untuk menampilkan output sebuah sistem dengan cara membentuk suatu citra atau gambaran pada sebuah layar. Secara garis besar komponen penyusun LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter polarisasi (polarizing filter).

 Gambar
Penampang komponen penyusun LCD
Gambar
Penampang komponen penyusun LCD
Liquid Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi untuk menampilkan output sebuah sistem dengan cara membentuk suatu citra atau gambaran pada sebuah layar. Secara garis besar komponen penyusun LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter polarisasi (polarizing filter).
Keterangan:
1. Film
dengan polarizing filter vertical untuk memolarisasi cahaya yang masuk.
2. Glass
substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).
3. Twisted
nematic liquid crystal (kristal cair dengan susunan terpilin).
4. Glass
substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).
5. Film
dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor
cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan mengombinasikan
kondisi nyala dan mati dari pixel-pixel yang menyusun layar sebuah LCD. Pada
umumnya LCD yang dijual di pasaran sudah memiliki integrated circuit tersendiri
sehingga para pemakai dapat mengontrol tampilan LCD dengan mudah dengan
menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin input yang
sudah tersediaKaki-kaki yang terdapat pada LCD

4. Motor Servo
Motor servo
adalah sebuah motor DC dengan sistem umpan balik tertutup di mana posisi
rotor-nya akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor
servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer,
dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut
dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan
lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor servo.
Prinsip
kerja motor servo
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa
(Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol
yang diberikan akan menentukan posisi sudut putaran dari poros motor servo.
Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros
motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan
berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam),
sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor
servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih
jelasnya perhatikan gambar dibawah in

5. LED
LED adalah suaatu semikonduktor yang memancarkan cahaya, LED mempunyai kecenderungan polarisasi. LED mempunyai kutub positif dan negatif (p-n) dan hanya akan menyala bila diberikan arus maju. Ini dikarenakan LED terbuat dari bahan semikonduktor yang hanya akan mengizinkan arus listrik mengalir ke satu arah dan tidak ke arah sebaliknya. Bila LED diberikan arus terbalik, hanya akan ada sedikit arus yang melewati LED. Ini menyebabkan LED tidak akan mengeluarkan emisi cahaya.

4. Listing Program [Kembali]
5. LED
LED adalah suaatu semikonduktor yang memancarkan cahaya, LED mempunyai kecenderungan polarisasi. LED mempunyai kutub positif dan negatif (p-n) dan hanya akan menyala bila diberikan arus maju. Ini dikarenakan LED terbuat dari bahan semikonduktor yang hanya akan mengizinkan arus listrik mengalir ke satu arah dan tidak ke arah sebaliknya. Bila LED diberikan arus terbalik, hanya akan ada sedikit arus yang melewati LED. Ini menyebabkan LED tidak akan mengeluarkan emisi cahaya.
Master
#define ldr A1
void setup() {
Serial.begin(9600);
}
void loop() {
int nilai = analogRead(ldr);
if (nilai <= 100) {
Serial.write('1');
}
else{
Serial.write('2');
}
delay(1000);
}
Slave
#include <LiquidCrystal.h>
#include <Servo.h>
LiquidCrystal lcd (13, 12, 11, 10, 9, 8);
Servo servo;
void setup() {
servo.attach(7);
Serial.begin(9600);
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print("SELAMAT DATANG");
delay(1000);
lcd.clear();
}
void loop() {
if (Serial.available() > 0)
{
char data = Serial.read();
if (data == '1')
{
lcd.setCursor(0, 0);
lcd.print("PORTAL ");
lcd.setCursor(0, 1);
lcd.print("TERBUKA");
delay(1000);
servo.write(90);
servo.write(0);
delay(500);
}
else{
servo.write(0);
servo.write(90);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("PORTAL ");
lcd.setCursor(0, 1);
lcd.print("TERTUTUP");
delay(500);
}
}
}
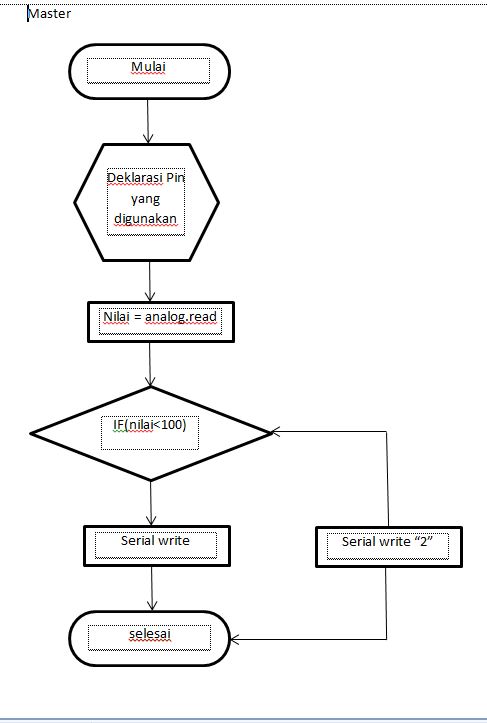
5. Flowchart [Kembali]
Master
Slave

5. Gambar rangkaian [Kembali]

6. Gambar Alat [Kembali]



7, Video Rangkaian Simulasi [Kembali]
8. Video Alat Yang sedang Berkerja [Kembali]
9. Analisa [Kembali]
Portal otomatis ini menggunkan
sensor (Light Dependen Resistor) yang mana sensor ini akan bekerja sesuai dari
integritas cahaya yang diterimanya, alat ini menngunkan jenis komunikasi UART pada
dua buah arduino, yang mana salah satu arduino berkerja sebagai input yaitu
Master dan salah satu bekerja sebagai output yaitu Slave, pada rangkaian ini
sensor pada LDR berkerja sebagai input dan LCD dan Motor servo bekerja sebagai
output, dan pada rangkaian ini motorservo akan terbuka apabila sensor LDR tidak
terkena cahaya atau cahaya yang diterima sedikit, dan data yang dikirim dari
master tadi akan dikirim sebagai oututan dari master dan inputan dari slave,
dan menggunkan jenis komunikasi UART dan menggunkan motor servo dan LCD sebagai
output, dan portal atau motor servo akan terbuka, dan memberi delay 5second kepada
portal untuk tertutup kembaali, dan LCD akan memberikan informasi apakah portal
tertutup atau terbuka
10. Link Download [Kembali]
link gambar
rangkaian
disini
link listing
program master disini
link listing
program slave disini
link video
rangkaian simulasi disini
link video
alat sedang bekerja disini
link HTML disini
Tidak ada komentar:
Posting Komentar